
第一作者:Yeongin Kim, Alex Chortos, Wentao Xu
通訊作者:Zhenan Bao, Wentao Xu, Tae-Woo Lee
通訊單位:斯坦福大學、首爾大學、南開大學
研究亮點:
1.發展了一種基于柔性有機電子器件的高靈敏度仿生觸覺神經系統,實現了對物體的運動、形狀、質感的多重觸覺感知,具有人腦特征。
3.構建了一種復合的生物電子反射弧。
讓機器人擁有觸覺,能夠感知這個世界的溫度、壓力,甚至是使其具有神經活動,應該是機器人領域的科學家最希望實現的事情了。如何提高人工電子器件的多功能性、柔性、生物兼容性以及靈敏度,則是該領域亟待解決的問題。
早在2009年,Nature Materials報道了斯坦福大學鮑哲楠課題組關于感知微小壓力的人造電子皮膚的研究成果。這種電子皮膚對于蝴蝶停留的微小壓力也能夠快速、高靈敏度感知,一時引起轟動。
2018年6月 1日,斯坦福大學鮑哲楠、首爾大學Tae-Woo Lee以及南開大學徐文濤團隊聯合在Science發文,報道了一種基于柔性有機電子器件的高靈敏度仿生觸覺神經系統。
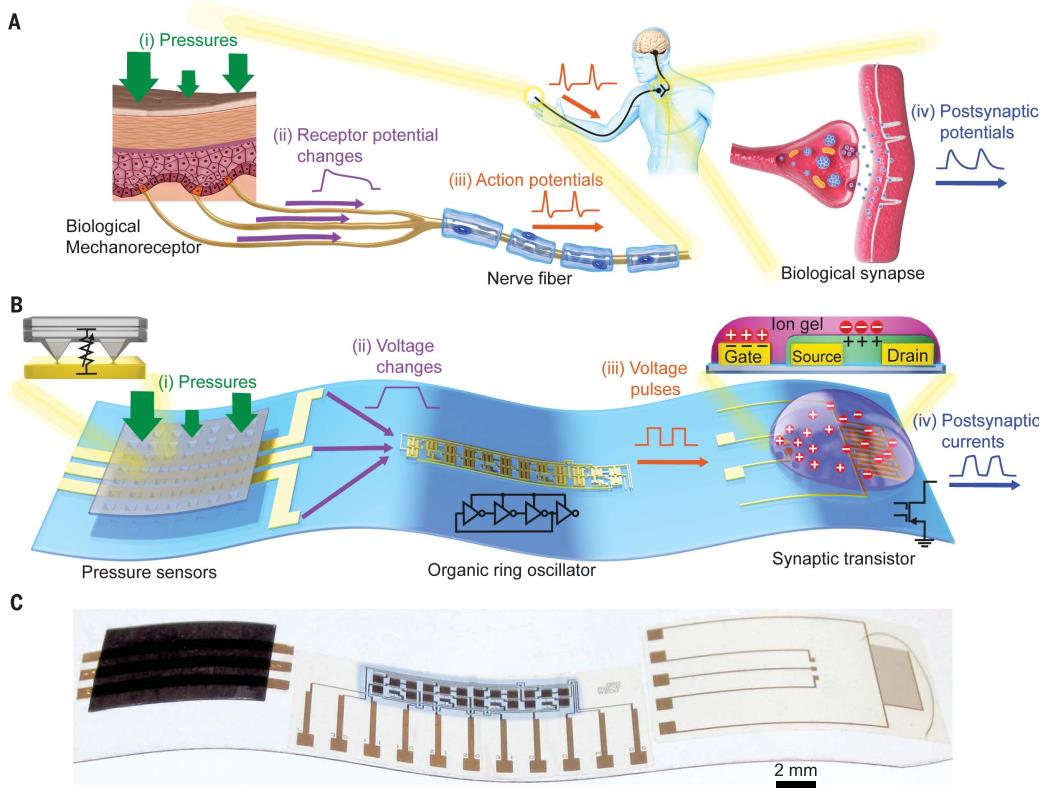
圖1. 高靈敏度仿生柔性觸覺神經系統
研究人員所開發的仿生觸覺神經是模仿人體SA-I觸覺神經,其主要原理是,從多個觸感接收器接受信息,然后將這種信息運輸到傳出(馬達)神經,完成一種復合的生物電子反射弧。
這種人工觸覺神經由三個核心部件組成:1)電阻式壓力傳感器;2)有機環振蕩器;3)突觸晶體管。每一個壓力傳感都是一個觸感接收器,所有的觸感信息(1 to 80 kilopascals)收集在人工神經纖維(環振蕩器)處,然后將外部觸覺刺激轉變成電信號(0 to 100 hertz)。從多個人工神經纖維得到的電信號集成到一起,經過突觸晶體管轉變為突觸電流。而突觸晶體管則可以用于構建生物觸覺神經,形成完整的單突觸反射弧。
這種人工神經觸覺系統具有高靈敏度,即便是蟑螂腿的運動,也能快速感知。將在機器人手術、義肢感觸等領域發揮重要作用!
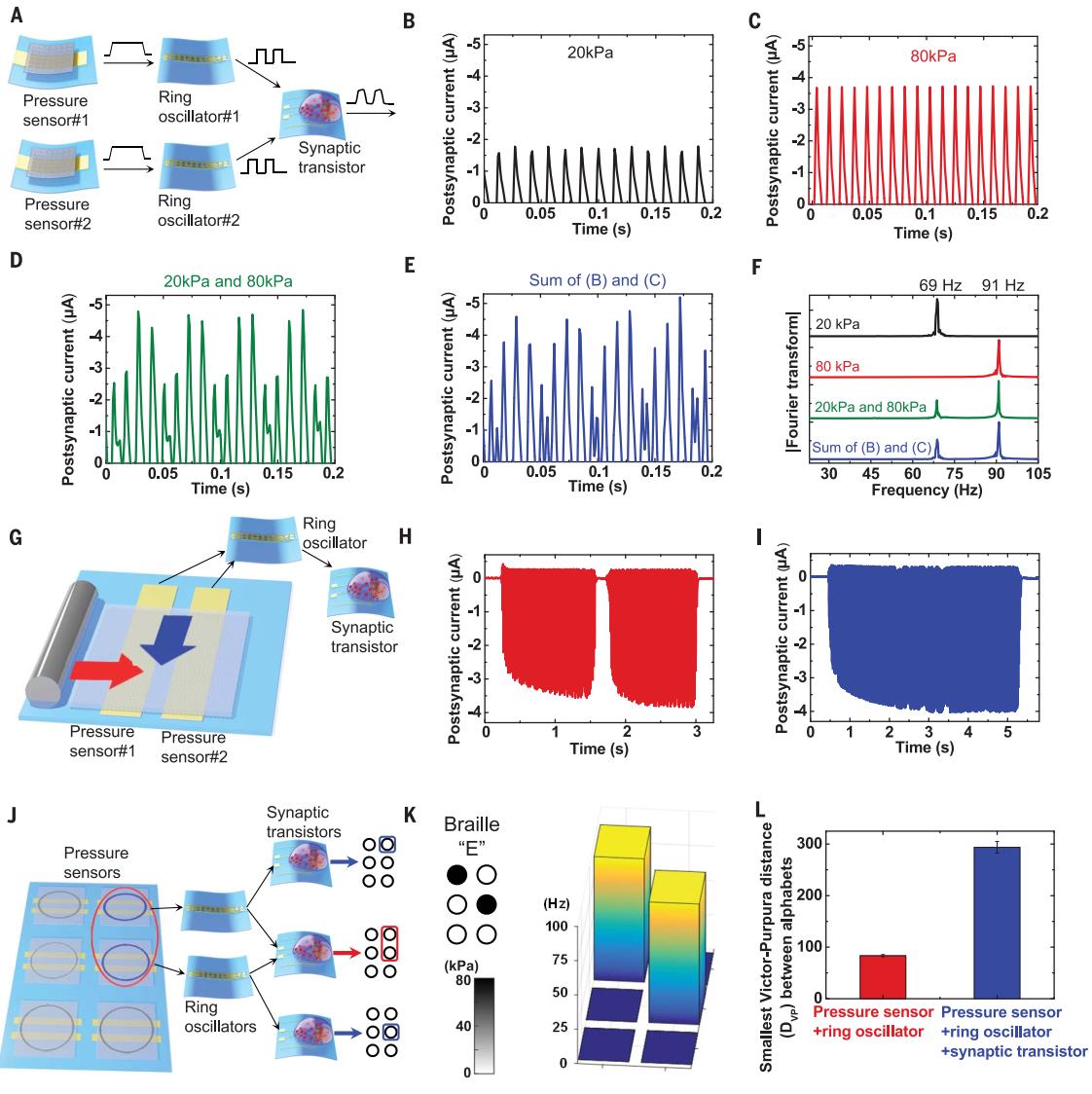
圖2. 人工觸覺神經系統的性能
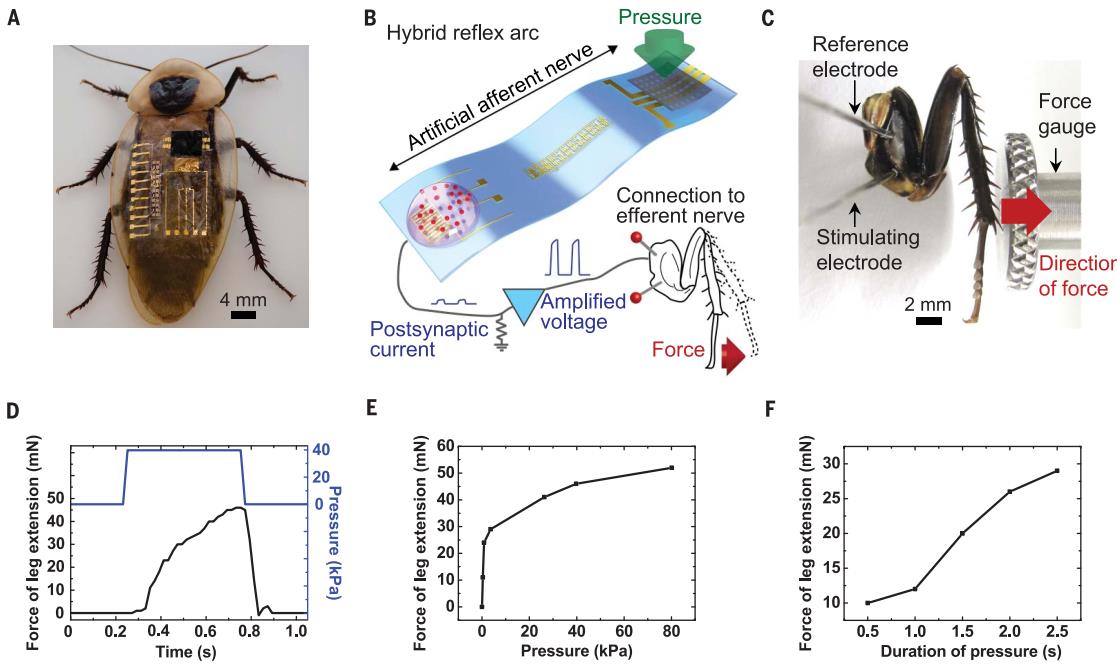
圖3. 復合物反射弧
參考文獻:
Yeongin Kim, Alex Chortos, Wentao Xu, Tae-Woo Lee, Zhenan Bao et al. A bioinspired flexible organic artificial afferent nerve. Science 2018, 360, 998-1003.










