機電接口在確定可拉伸應變傳感器的性能方面起著關鍵作用。彈性體基底的固有機械特性阻礙了機電接口的有效調制,這限制了可拉伸應變傳感器的進一步發展。
近日,電子科技大學Taisong Pan,Yuan Lin,江西理工大學Tiedong Cheng展示了手性拉脹超材料(CAM)在可拉伸應變傳感器的基底應變工程中的實現。
文章要點
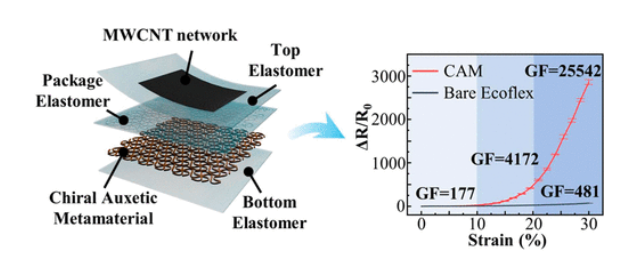
1)該裝置的基板被設計為核殼結構,其中CAM作為“機械核”來調節“彈性體殼”的變形。
2)憑借手性網格布局的旋轉對稱幾何形狀,CAM 顯示出各向同性拉脹效應,并且能夠在不選擇性施加應變方向的情況下調節變形。 CAM剛度的調整使得基板的泊松比可從0.37到-0.25進行配置,從而使傳感器的靈敏度全方位增強,高達53倍。在從 0 到 135° 變化的拉伸方向上捕獲電阻變化對所施加應變的一致響應。
3)通過跟蹤活性材料層中的裂紋擴展,還討論了利用 CAM 進行基底應變工程的機制。作為概念驗證,研究人員展示了具有核殼設計的可拉伸應變傳感器在生理監測和變形定位中的應用。由于CAM的調節作用,可以檢測到徑向脈搏、喉嚨振動、關節運動、臉頰腫脹、頸部運動等小變形和大變形的生理信號。此外,展示了一種可實時識別跳躍位置和偏移方向的智能蹦床原型,用于體操訓練。
參考文獻
Taiqi Hu, et al, Omnidirectional Configuration of Stretchable Strain Sensor Enabled by the Strain Engineering with Chiral Auxetic Metamaterial, ACS Nano, 2023
DOI: 10.1021/acsnano.3c08624
https://doi.org/10.1021/acsnano.3c08624