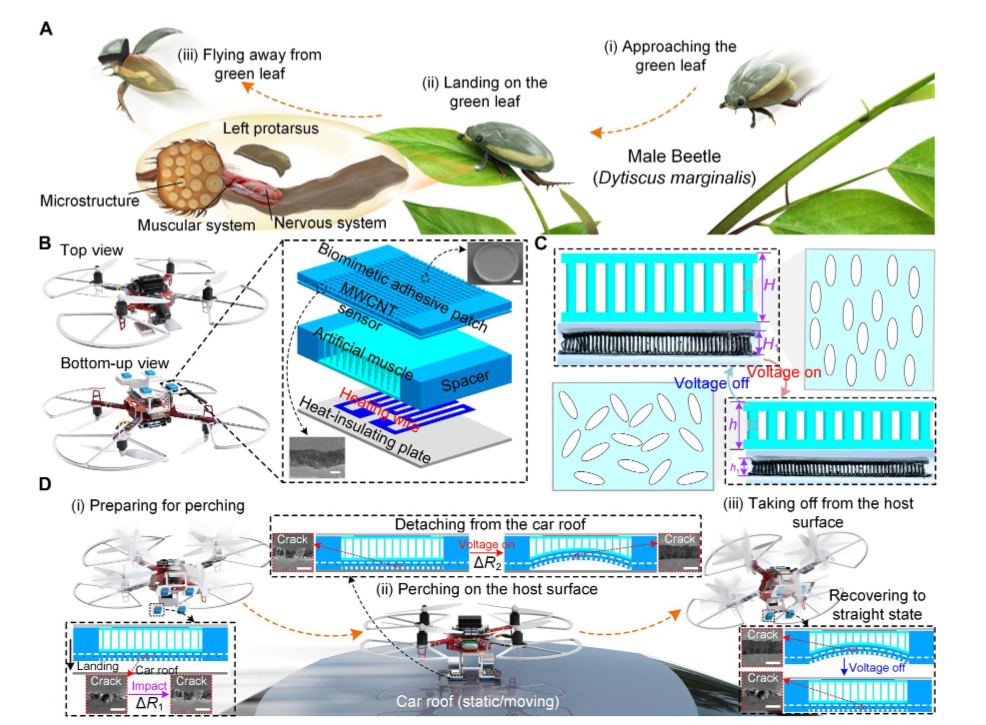
棲息起跳機器人可以有效地節省機載能量,實現長續航。然而,棲息起飛機器人在移動目標上的動態棲息仍然具有挑戰性,原因是動態著陸的自主性較小,著陸時的沖擊力很大,對棲息表面的接觸適應性較弱。
近日,西安交通大學邵金友教授,Hongmiao Tian提出了一種基于一體式電活性智能粘合劑的自感知、抗沖擊、可接觸的棲息和起飛機器人,用于可逆地棲息在運動/靜態的干/濕表面上,并節省車載能源。
文章要點
1)其中,分立柱附著結構在不同的干/濕表面上具有接觸適應性,附著穩定,抗反彈;三明治狀人工肌肉減輕重量,增強阻尼,簡化控制,實現快速附著切換(開關比在幾秒鐘內接近∞);靈活的壓力(每千帕卡0.204%)和變形(力分辨率,<250萬牛頓)傳感器使機器人能夠自主。
2)因此,搭載電活性智能粘合劑的棲息起飛機器人表現出了軟性材料相對于剛性材料的巨大優勢,并具有在運動目標上動態棲息的良好應用前景。
參考文獻
Haoran Liu, et al, Electrically active smart adhesive for a perching-andtakeoff robot, Sci. Adv. 9 (43), eadj3133.
DOI: 10.1126/sciadv.adj3133
https://www.science.org/doi/10.1126/sciadv.adj3133