在微創血管內手術中,外科醫生依靠低靈巧度和高縱橫比的導管來達到解剖目標。然而,心臟跳動中的環境帶來了少數解剖位置獨有的挑戰,使得介入工具很難靈活地操作并對心臟內靶點施加實質性力量。
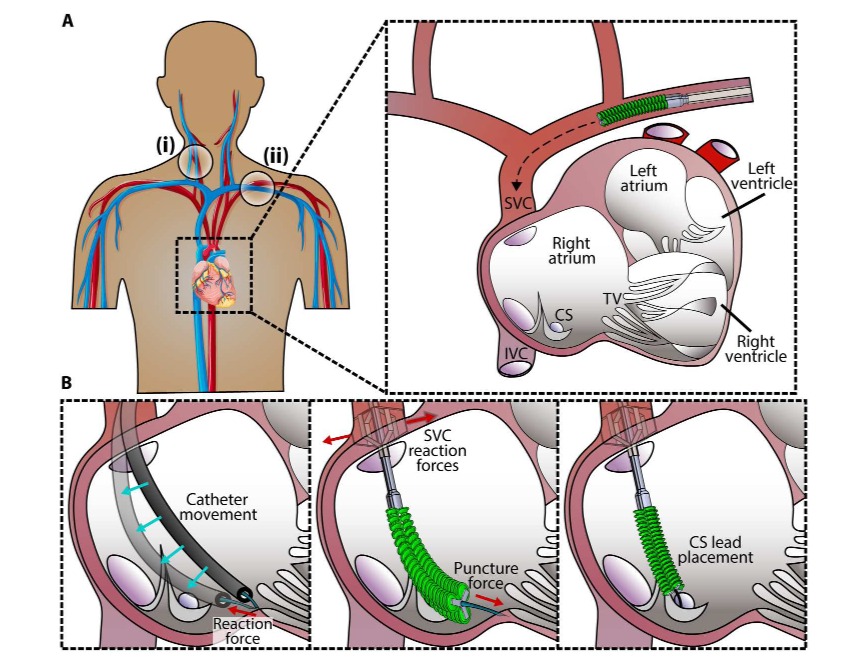
近日,波士頓大學Tommaso Ranzani展示了一個毫米級的軟機器人平臺,它可以在心臟入口處部署和自我穩定,并引導現有的介入工具朝向目標位置。
文章要點
1)在右心房內的兩個示范心內手術中,機器人平臺提供了足夠的靈活性來到達多個解剖目標,足夠的穩定性來保持與運動目標的持續接觸,以及足夠的機械杠桿來產生牛頓水平的力。
2)由于該設備解決了微創心內介入的持續挑戰,它可能會使基于導管的介入的進一步發展成為可能。
參考文獻
Jacob Rogatinsky, et al, A multifunctional soft robot for cardiac interventions, Sci. Adv. 9 (43), eadi5559.
DOI: 10.1126/sciadv.adi5559
https://www.science.org/doi/10.1126/sciadv.adi5559