 微型生物和運動細胞使用基于蛋白質的彈簧狀響應結構來感知、抓握和移動。在人工微機械中實現(xiàn)這種生物力學功能以用于單細胞操作仍極具挑戰(zhàn)性,因為需要對皮牛頓級力具有可編程應變響應的納米級彈簧系統(tǒng)。近日,中國科學院Haifeng Xu、德國萊布尼茨固態(tài)和材料研究所Mariana Medina-Sánchez、開姆尼茨工業(yè)大學Oliver G. Schmidt報道了具有超柔順皮力彈簧的軟微型機器人。
微型生物和運動細胞使用基于蛋白質的彈簧狀響應結構來感知、抓握和移動。在人工微機械中實現(xiàn)這種生物力學功能以用于單細胞操作仍極具挑戰(zhàn)性,因為需要對皮牛頓級力具有可編程應變響應的納米級彈簧系統(tǒng)。近日,中國科學院Haifeng Xu、德國萊布尼茨固態(tài)和材料研究所Mariana Medina-Sánchez、開姆尼茨工業(yè)大學Oliver G. Schmidt報道了具有超柔順皮力彈簧的軟微型機器人。
本文要點:
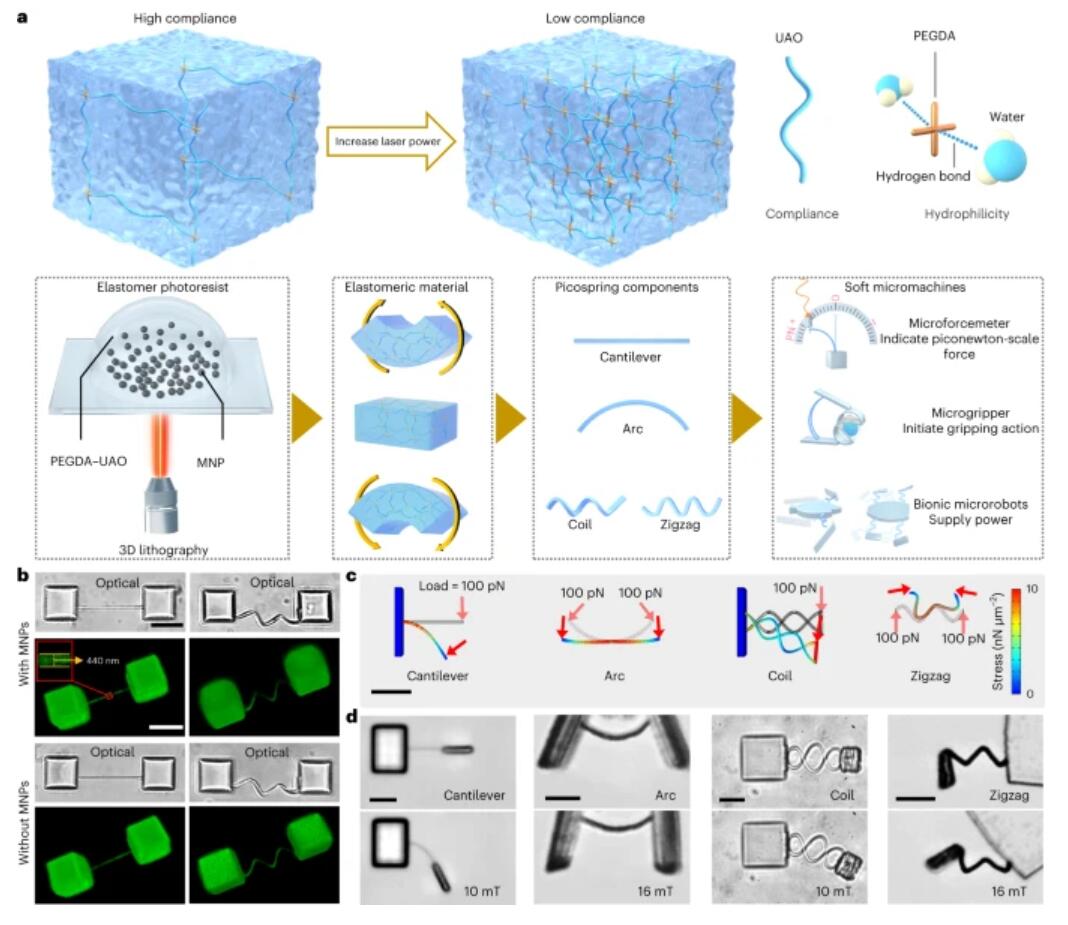
1) 基于丙烯酸彈性體光致抗蝕劑,作者介紹了磁性彈簧系統(tǒng)的3D納米制造和單片集成,該系統(tǒng)具有對0.5 pN敏感的可量化順應性?,可用以納米級的定制彈性和磁化分布構建。
2) 作者展示了這些“皮彈簧”組件作為能量轉換結構的可編程性,可用于定制軟微機械的集成構建,并且具有板載傳感和驅動功能,從而用于微型機器人的抓取和移動。
Haifeng Xu et.al 3D nanofabricated soft microrobots with super-compliant picoforce springs as onboard sensors and actuators Nature Nanotechnology 2024
DOI: 10.1038/s41565-023-01567-0
https://doi.org/10.1038/s41565-023-01567-0

















