人類的手在識別和處理不同大小和形狀的物體方面有著驚人的技能。迄今為止,軟體機器人在精細感知和靈巧操作方面很少表現出與人類相當的自主性。
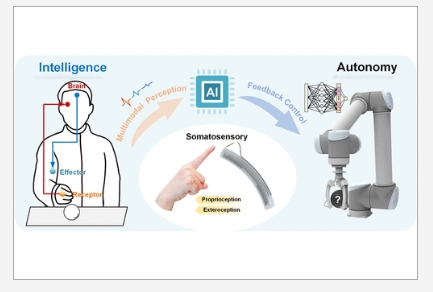
近日,上海大學Long Li,Quan Zhang,新加坡國立大學Chengkuo Lee將電容式傳感器與摩擦電傳感器相結合,開發了具有自主操作和多模態感知能力的智能軟機器人系統。
文章要點
1)通過分布式多傳感器,我們的機器人系統不僅可以感知和記憶多模態信息,還可以實現自適應抓取方法,用于機器人定位和抓取控制,在此過程中,可以靈敏地捕獲多模態感官信息并在特征層面進行融合,從而進行交叉模態識別,從而大大增強識別能力。
2)該系統結合了生物系統的性能和物理智能(即自適應行為和多模態感知),將極大地推動軟執行器與機器人在許多領域的融合。
參考文獻
Tianhong Wang, et al, Multimodal Sensors Enabled Autonomous Soft Robotic System with Self-Adaptive Manipulation, ACS Nano, 2024
DOI: 10.1021/acsnano.3c11281
https://doi.org/10.1021/acsnano.3c11281