
同濟(jì)大學(xué)Zhijun Li等認(rèn)為大多數(shù)可穿戴機(jī)器人(如外骨骼和假肢)可以靈巧地操作,而穿戴者不會將其視為身體的一部分。
本文要點(diǎn):
(1)
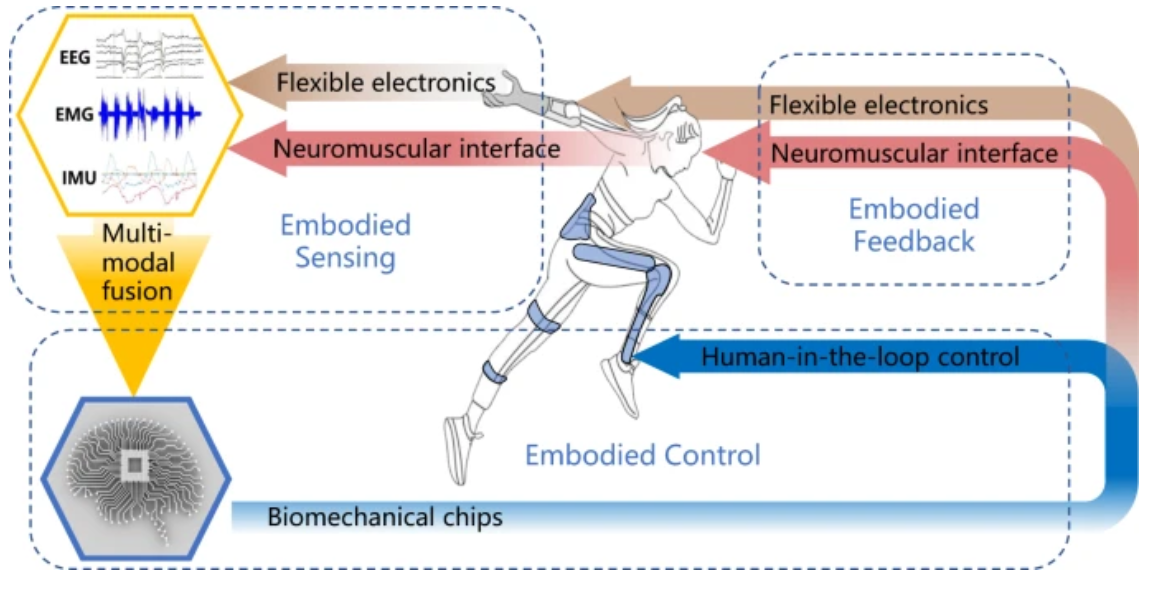
通過多模態(tài)融合整合環(huán)境、生理和物理信息,納入人在回路控制,利用神經(jīng)肌肉接口,采用柔性電子設(shè)備,以及利用生物機(jī)電芯片獲取和處理人-機(jī)器人信息,都應(yīng)被用于構(gòu)建下一代可穿戴機(jī)器人。
(2)
這些技術(shù)可以改善可穿戴機(jī)器人的表現(xiàn)形式。隨著機(jī)械結(jié)構(gòu)和臨床訓(xùn)練的優(yōu)化,下一代可穿戴機(jī)器人應(yīng)該能夠更好地促進(jìn)人類運(yùn)動和感覺的重建和增強(qiáng)。
參考文獻(xiàn):
Xia, H., Zhang, Y., Rajabi, N. et al. Shaping high-performance wearable robots for human motor and sensory reconstruction and enhancement. Nat Commun 15, 1760 (2024).
DOI: 10.1038/s41467-024-46249-0
https://doi.org/10.1038/s41467-024-46249-0

















