環境驅動的可持續自主運動是一種先進的智能行為,類似于生物有機體的無意識行為,如心跳和蠕動。在這項研究中,受軟體動物爬行運動的啟發,吉林大學宋正義、李冰倩等人介紹了一種具有偏心鉸鏈結構的自持振蕩軟機器人。
本文要點:
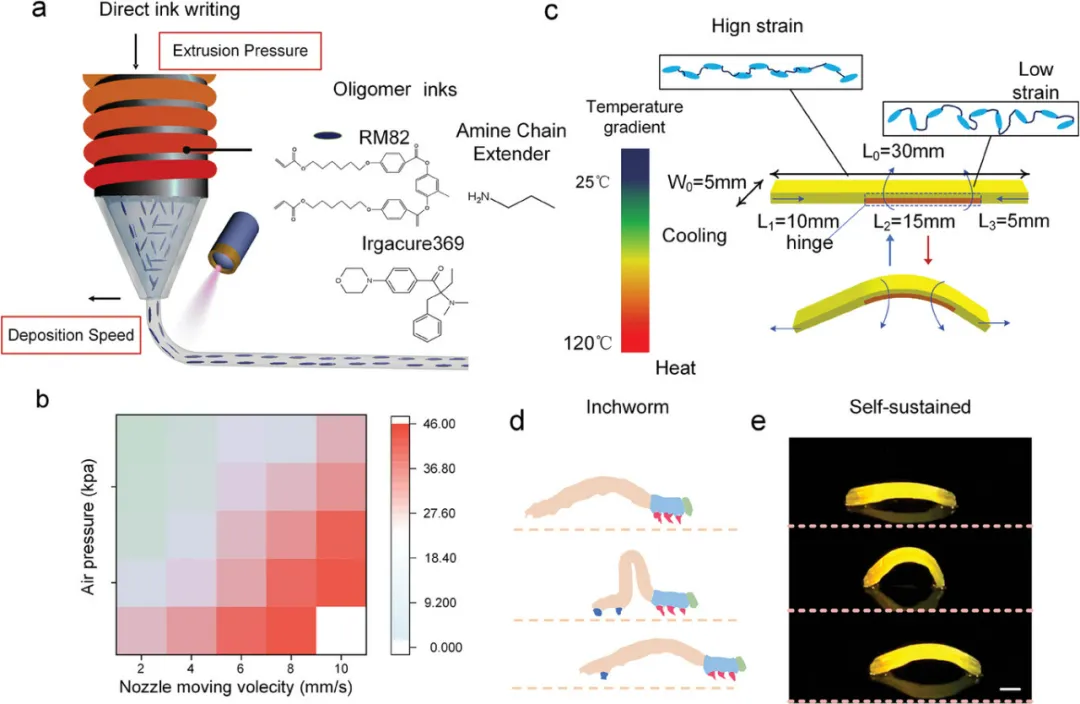
1)采用參數編碼的4D打印方法對偏心鉸鏈結構的局部應變進行預編程,使軟機器人在恒定的熱場下具有可持續的爬行運動。通過襯底摩擦、偏心鉸鏈結構和襯底溫度的耦合設計,軟機器人可以實現可調諧的爬行、滾動和振蕩。
2)作者提出了兩種應用,即光學斬波器和發電機,作為概念的證明。這項工作為軟機器人在航空航天和醫療領域等受限環境中的應用提供了一個可行的解決方案。
參考文獻:
L. Ren, et al., 4D Printed Self-Sustained Soft Crawling Machines Fueled by Constant Thermal Field. Adv. Funct. Mater. 2024, 2400161.
https://doi.org/10.1002/adfm.202400161

















