
毫米級(jí)軟連續(xù)體機(jī)器人由于其被動(dòng)順應(yīng)性,在腔內(nèi)手術(shù)中提供了安全性和適應(yīng)性,但這一特點(diǎn)需要與周圍管腔相互作用,從而導(dǎo)致潛在的醫(yī)療風(fēng)險(xiǎn)和行動(dòng)受限。鑒于此,來(lái)自哈爾濱工業(yè)大學(xué)的謝暉、孟祥和和張?zhí)柕冉淌?/span>研究出了一種毫米級(jí)連續(xù)體機(jī)器人,能夠在保持結(jié)構(gòu)穩(wěn)定性的同時(shí)實(shí)現(xiàn)頂端延伸。
文章要點(diǎn):
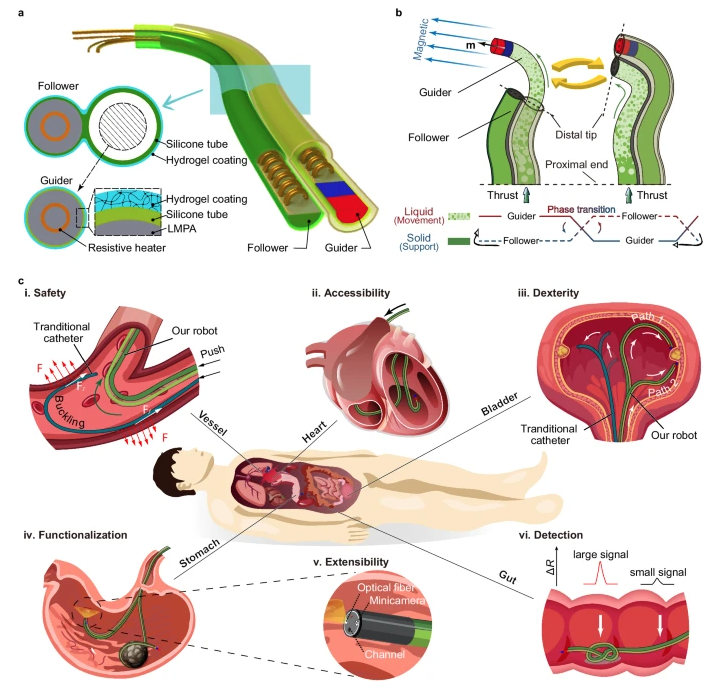
1) 該研究證實(shí),利用相變?cè)瑱C(jī)器人執(zhí)行基于尖端的伸長(zhǎng)周期,通過(guò)可編程磁場(chǎng)精確操縱,并且,每個(gè)運(yùn)動(dòng)周期都有一個(gè)用于穩(wěn)定的固體狀骨架和一個(gè)用于推進(jìn)的液體狀組件,從而實(shí)現(xiàn)自主成形,而不依賴于環(huán)境相互作用,同時(shí),結(jié)合臨床成像技術(shù),研究展示了在彎曲和脆弱的管腔中導(dǎo)航以運(yùn)輸顯微外科工具的能力;
2) 此外,該研究表明,一旦該機(jī)器人到達(dá)胃等更大的解剖空間,它就可以變形為用作手術(shù)工具或傳感單元的功能性3D結(jié)構(gòu),克服最初狹窄路徑的限制,通過(guò)利用這一設(shè)計(jì)范式,該毫米級(jí)連續(xù)體機(jī)器人之間的安全性、多功能性和協(xié)作能力將得到增強(qiáng),為腔內(nèi)機(jī)器人手術(shù)開(kāi)辟新的途徑。
參考資料:
Mao, L., Yang, P., Tian, C. et al. Magnetic steering continuum robot for transluminal procedures with programmable shape and functionalities. Nat. Commun.(2024).
DOI:10.1038/s41467-024-48058-x
https://doi.org/10.1038/s41467-024-48058-x

















