為了使智能機器人設備在常見的液滴環境中具有增強感知和自主調控的能力,需要開發能夠深度全面檢測液體信息的電子皮膚。目前,電子皮膚的一個技術限制是無法像人一樣真實地感知液體滑動信息并及時反饋。
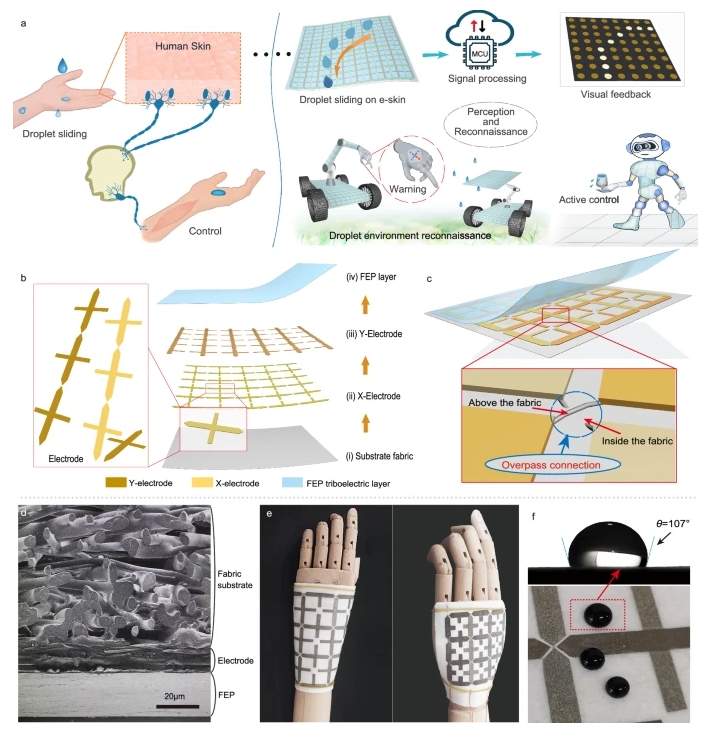
針對這一關鍵挑戰,新加坡國立大學Chengkuo Lee,東華大學Guangbiao Xu,中科院蘇州納米所Zhiqing Bai通過構建巧妙的共層交織電極網絡和采用跨橋連接方式,提出了一種自供電的仿生液滴電子皮膚。
文章要點
1)該仿生皮膚用于液滴環境偵察,將各種動態液滴滑動行為轉換為基于摩擦電的電信號。
2)更重要的是,電子皮膚可以全面感知液滴的二維滑動行為,并在指示器上實時直觀地反饋。
3)此外,該電子皮膚還實現了流向預警和漏水智能閉環控制,達到了人體神經調控的效果。
這一策略彌補了電子皮膚感知液滴的局限性,大大縮小了人造電子皮膚與人體皮膚在感知功能上的差距。
參考文獻
Xu, Y., Sun, Z., Bai, Z. et al. Bionic e-skin with precise multi-directional droplet sliding sensing for enhanced robotic perception. Nat Commun 15, 6022 (2024).
DOI:10.1038/s41467-024-50270-8
https://doi.org/10.1038/s41467-024-50270-8