大多數(shù)靈活的人機(jī)接口都模仿皮膚的觸覺(jué)系統(tǒng),這有接觸損傷的風(fēng)險(xiǎn)。此外,接觸變形通常會(huì)導(dǎo)致滯后響應(yīng)。非接觸式互動(dòng)可以解決這些問(wèn)題。
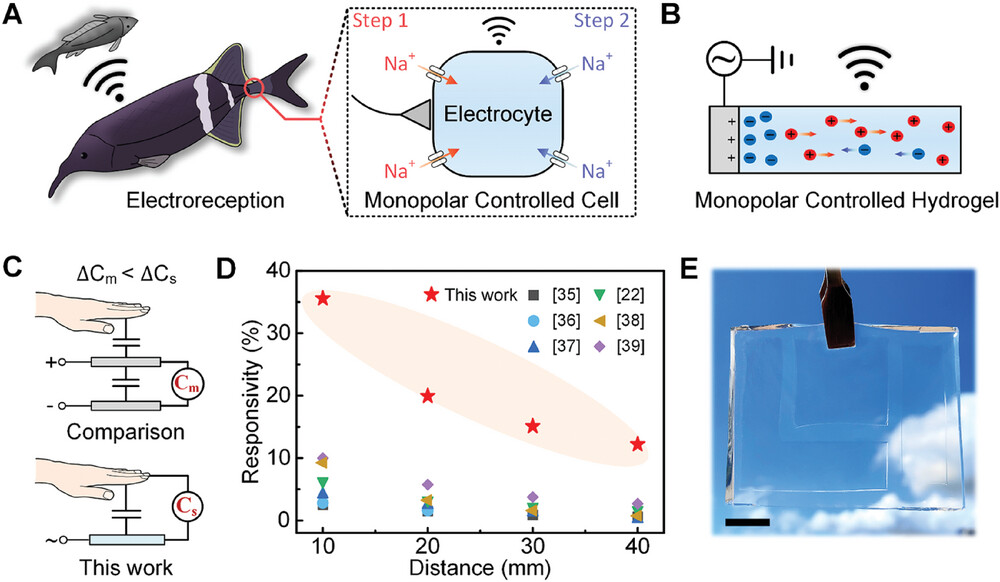
受象鼻魚(yú)電接收能力的啟發(fā),哈爾濱工業(yè)大學(xué)姜洪源、臧天儀和香港理工大學(xué)王鉆開(kāi)、香港城市大學(xué)Jun Liu等人介紹了一種采用單極控制離子水凝膠的非接觸式傳感模型。
本文要點(diǎn):
1)與大多數(shù)現(xiàn)有的互電容非接觸式傳感模型相比,該模型不僅將響應(yīng)率提高了3.5倍以上,還簡(jiǎn)化了傳感架構(gòu)。利用這種傳感模型,通過(guò)將三種不同形狀的水凝膠組織成不對(duì)稱的配置,開(kāi)發(fā)了一種靈活的非接觸式人機(jī)接口。
2)該設(shè)備使用機(jī)器學(xué)習(xí)算法可靠地識(shí)別六種非接觸式手勢(shì),并通過(guò)檢測(cè)手勢(shì)的持續(xù)時(shí)間支持至少十一種交互功能,從而能夠?qū)ν獠吭O(shè)備進(jìn)行連續(xù)的實(shí)時(shí)控制。這一進(jìn)步預(yù)示著人機(jī)交互的范式將更加自由,對(duì)物聯(lián)網(wǎng)有著積極的影響。
參考文獻(xiàn):
W. Wu, T. Jiang, M. Wang, T. Li, Y. Song, J. Liu, Z. Wang, H. Jiang, Bioinspired Monopolar Controlled Ionic Hydrogels for Flexible Non-Contact Human–Machine Interfaces. Adv. Funct. Mater. 2024, 2408338.
https://doi.org/10.1002/adfm.202408338

















