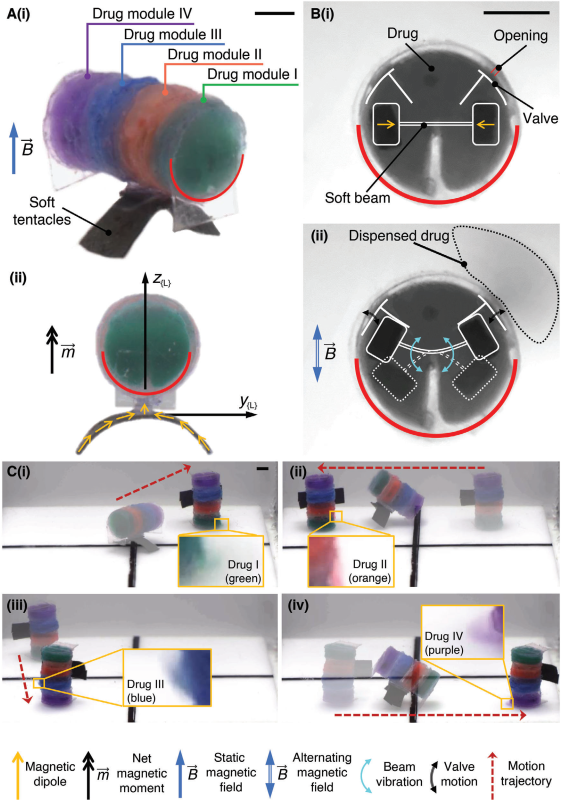
微型機器人是一種無系致動器,能夠將高濃度的藥物遞送到疾病部位,并且不會產生嚴重的并發癥,因此其在藥物靶向遞送領域中具有廣闊的應用前景。然而,由于大多數遞送載體最多只能遞送一種藥物,而能夠遞送多種藥物的工具往往無法改變其配藥順序和劑量,因此現有的微型機器人仍難以實現先進的靶向聯合治療。目前,已有的機器人無法遞送三種以上的藥物,并且不能選擇性地分配藥物、保持機動性以及在多點實現藥物釋放。有鑒于此,南洋理工大學Guo Zhan Lum教授設計了一種毫米級柔性機器人,該機器人可以通過交變磁場進行驅動,能夠以可重編程的出藥順序和劑量(出藥速率:0.0992-0.231 μL h?1)分配四種藥物。
本文要點:
(1)該機器人有六個自由度的運動,可通過滾動和雙錨爬行以在非結構化環境中將藥物按需遞送到多個地點,并且不會產生嚴重的藥物泄漏。研究發現,這種能夠分配藥物的微型機器具有非常優越的靈活性。
(2)實驗結果表明,該研究開發的柔性機器人可將四種藥物按需、以特定的順序和劑量遞送到不同的疾病部位,有望能夠實現先進的靶向聯合治療。
Zilin Yang. et al. Magnetic Miniature Soft Robot with Reprogrammable Drug-Dispensing Functionalities: Toward Advanced Targeted Combination Therapy. Advanced Materials. 2024
DOI: 10.1002/adma.202408750
https://onlinelibrary.wiley.com/doi/10.1002/adma.202408750


















