軟連續機器人可以穿越狹窄而曲折的管腔。然而,它在轉向過程中與管腔的相互作用會造成管腔損傷的風險,尤其是當它集成了多功能單元時,這會增加機器人的尺寸和局部剛度。
因此,哈爾濱工業大學謝暉、孟祥晨等人設計了一種由同軸組裝的引導器和跟隨器組件組成的連續機器人,利用相變材料進行非交互式導航和多功能操作。
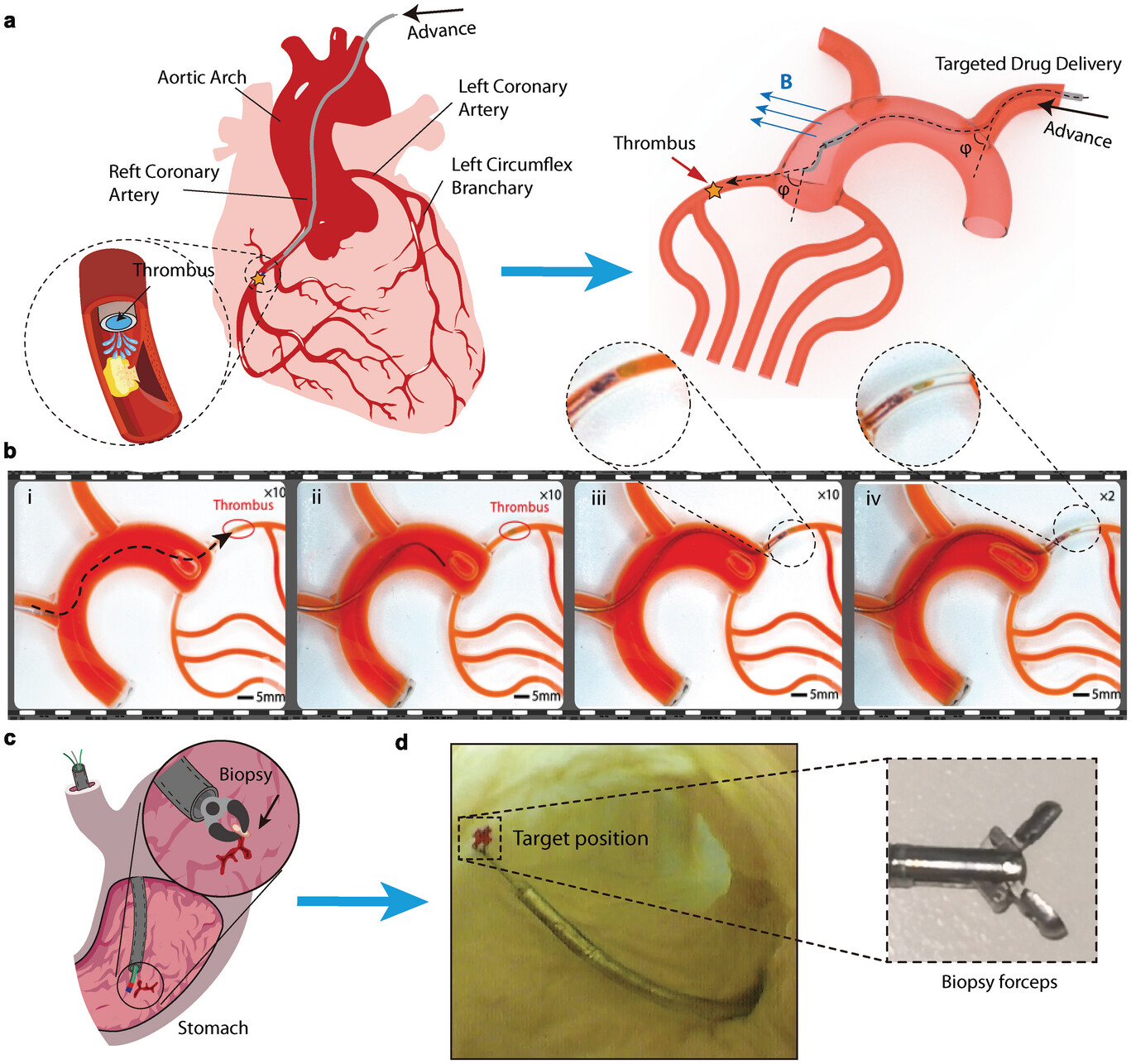
導航通過交替的軟化-硬化循環進行:首先,引導器在磁轉向下軟化并前進,而剛性跟隨器提供支撐。然后,引導器凝固形成新的主干,而跟隨器軟化以復制其路徑。該過程保持結構完整性,同時能夠沿著所需的軌跡導航,從而大大減少與管腔的相互作用。
為了進一步在大型開放空間中完成復雜任務,開發了一種具有三重引導器的連續機器人系統,其中通過分段剛度調節精確且連續地控制個體的多自由度運動。這種配置可實現多種操作,包括復雜環境中的定向投放、精確涂覆、抓取和障礙清除。這種連續機器人設計結合了協同運動和多種功能,為微創外科手術中的靈巧導航和干預提供了一種新方法。
參考文獻:
P. Yang, L. Mao, C. Tian, X. Meng, H. Xie, A Cooperative and Multifunctional Magnetic Continuum Robot for Noninteractive Access, Dexterous Navigation, and Versatile Manipulation. Adv. Funct. Mater. 2024, 2412543.
https://doi.org/10.1002/adfm.202412543

















