厘米級水下機器人可用于環(huán)境監(jiān)測、探索和水環(huán)境干預。然而,現(xiàn)有的機器人依賴于人造聚合物和商業(yè)電子元件,如果不回收,可能會污染和破壞敏感的生態(tài)環(huán)境。
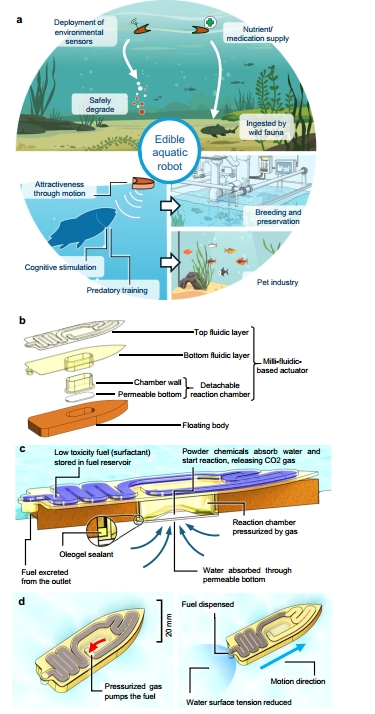
為了解決這些挑戰(zhàn),洛桑聯(lián)邦理工學院Dario Floreano描述了一種完全可生物降解和完全可食用的自推進裝置,利用馬蘭戈尼效應進行自主推進。
文章要點
1)可食用水生機器人的身體是由凍干魚食制成的,由水觸發(fā)的氣動反應提供動力,通過持續(xù)釋放對水生動物安全的表面活性劑來產(chǎn)生運動。
2)該設備的可生物降解且無毒成分允許安全地部署環(huán)境,以進行環(huán)境傳感、在水生環(huán)境中輸送營養(yǎng)或藥物。
所提出的方法大大擴大了小型水上機器人的潛在好處,這些機器人可以大規(guī)模部署,而無需取回它們,甚至像動物一樣在野生動物壽命結(jié)束時為它們提供營養(yǎng)。
參考文獻
Zhang, S., Kwak, B., Zhu, R. et al. Edible aquatic robots with Marangoni propulsion. Nat Commun 16, 4238 (2025).
DOI:10.1038/s41467-025-59559-8
https://doi.org/10.1038/s41467-025-59559-8