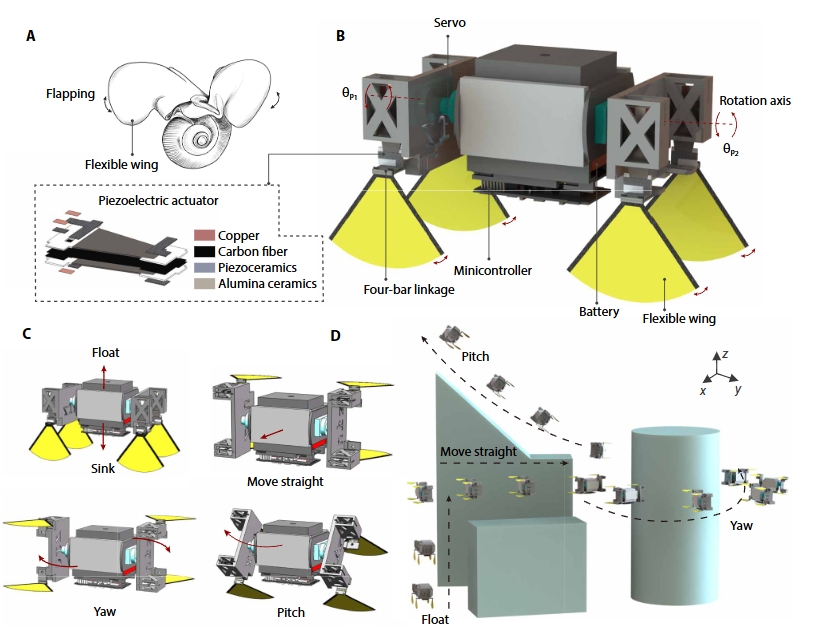
在狹窄的水下環(huán)境中進(jìn)行探索是一個(gè)巨大的挑戰(zhàn),因?yàn)樾枰诓煌倪\(yùn)動(dòng)模式之間進(jìn)行靈活的運(yùn)動(dòng)和魯棒的轉(zhuǎn)換。翼足類動(dòng)物是一種小型水生生物,能夠通過調(diào)整翅膀的攻角來改變方向。
受到翼足類動(dòng)物的啟發(fā),浙江大學(xué)Haofei Zhou,Shaoxing Qu, Yide Liu開發(fā)了一種仿生機(jī)器人平臺RoboPteropod。
文章要點(diǎn)
1)這種微型水下機(jī)器人,它裝備有模仿翼足類動(dòng)物推進(jìn)機(jī)制的柔性撲翼,漂浮速度達(dá)到每秒1.88個(gè)身長,向前速度達(dá)到每秒1.2個(gè)身長,而功耗僅為580毫瓦。
2)能夠動(dòng)態(tài)調(diào)整機(jī)翼的攻角,使水下運(yùn)動(dòng)的各種模式(漂浮,直線移動(dòng),偏航和俯仰)之間的平穩(wěn)過渡,允許在復(fù)雜的水生環(huán)境中敏捷,三維機(jī)動(dòng)。因此,RoboPteropod為詳細(xì)探索有限的和其他無法進(jìn)入的水下空間提供了有意義的潛力。
參考文獻(xiàn)
Taishan Liu, et al, A bioinspired multimotion modality underwater microrobot, Sci. Adv. 11, eadu2527 (2025)
DOI: 10.1126/sciadv.adu2527